Architecture & Core Concepts
Nexus SDV is a cloud-native reference implementation designed to bridge the gap between in-vehicle software and scalable automotive backends. It provides a modular foundation for building, securing, and scaling vehicle platforms on Google Cloud.
Nexus Functional Pillars
Section titled “Nexus Functional Pillars”
The architecture is built around four core pillars that address the fundamental requirements of a modern Software Defined Vehicle ecosystem:

In-Vehicle Integration
Providing standardized interfaces for hardware abstraction and operating systems like AAOS.

Security & Trust
Establishing unique vehicle identities and encrypted communication through a robust Public Key Infrastructure (PKI).

Telemetry & Data
Enabling high-frequency, low-latency data streams from the edge to a scalable Bigtable time-series sink.

Developer Velocity
Enabling innovation at speed with automated infrastructure-as-code and one-step bootstrap scripts.
High-Level Architecture
Section titled “High-Level Architecture”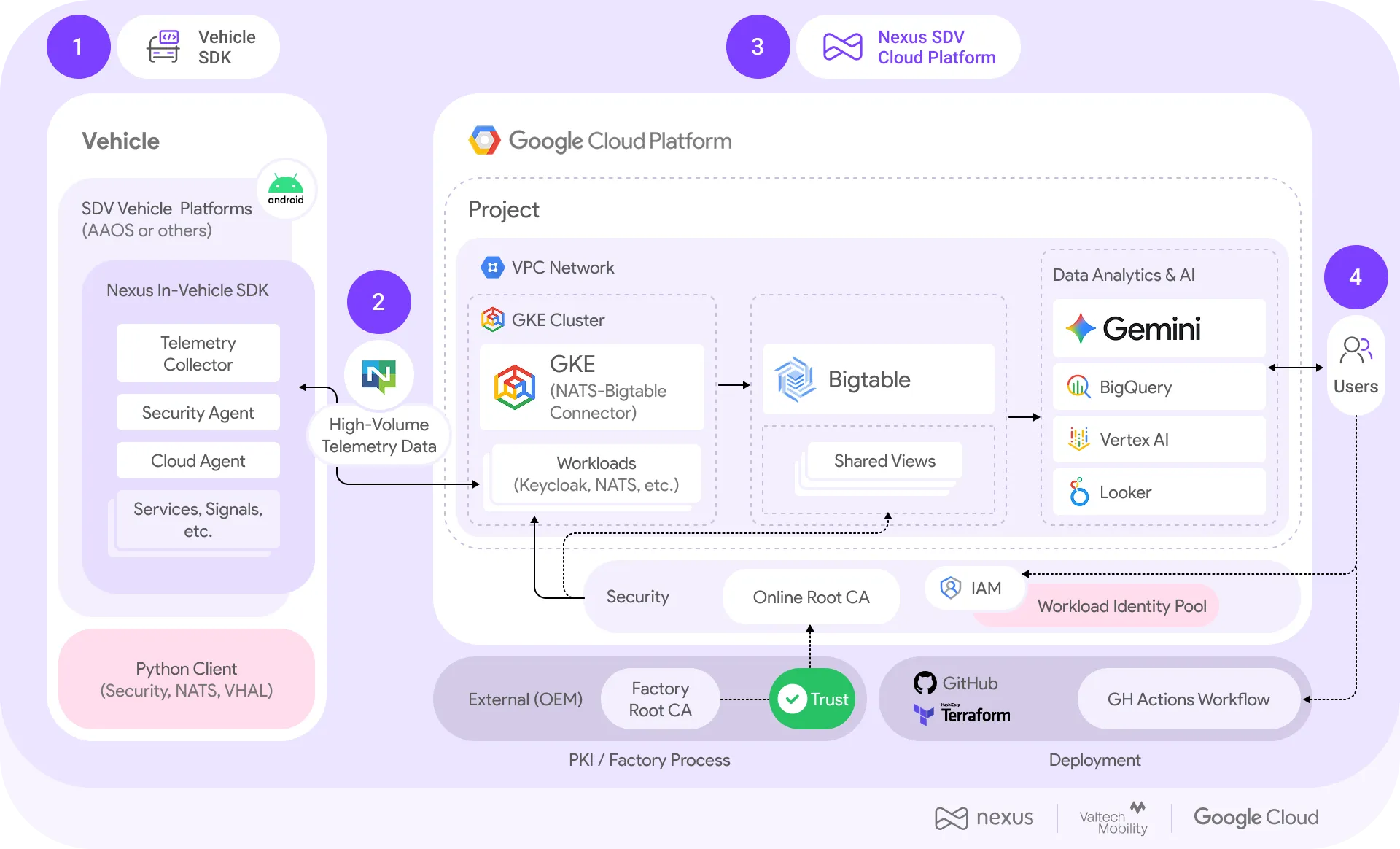
Nexus SDV follows a clean, three-tier separation to ensure scalability, security, and architectural parity between the vehicle and the cloud.
1. Vehicle Tier & SDK
Section titled “1. Vehicle Tier & SDK”Nexus defines a standardized approach for vehicle registration and factory provisioning, utilizing established industry standards to ensure a secure “birth process”.
- Standardized Onboarding: Detailed requirements for the production process ensure that every vehicle starts with a verifiable identity. For a deep dive into these handshakes, refer to our Security Concepts.
- Reference Implementation (SDK v1): To demonstrate these concepts in practice, we provide example clients in Python and Go. These serve as the first iteration of our in-vehicle SDK, handling mTLS handshakes and standardized telemetry transmission out-of-the-box.
2. Connectivity Layer (NATS)
Section titled “2. Connectivity Layer (NATS)”At the heart of our communication is NATS, serving as a high-performance, lightweight Connectivity Layer.
- Beyond Telemetry: While telemetry is our initial focus, NATS is designed as the central nervous system for all vehicle-to-cloud interaction, including Command & Control and Streaming.
- Channel Separation: For optimal performance, large binary objects (BLOBs) are handled via separate data channels, keeping the NATS backbone lean for real-time signals.
- Roadmap: We are currently expanding this layer to include NATS Leaf Nodes, enabling even more robust edge-to-cloud patterns and local processing capabilities.
3. Cloud Backend & “Cloud ECU”
Section titled “3. Cloud Backend & “Cloud ECU””The backend is built for massive scale and seamless integration into the Google Cloud ecosystem.
- Compute Layer: We leverage Kubernetes (GKE) as our primary compute platform, with a strong preference for ARM-based instances to maintain architectural consistency with automotive hardware.
- The Cloud ECU Concept: By utilizing Bigtable as a schemaless NoSQL sink, we store vehicle data 1:1 in its original signal/data format. This effectively turns the cloud backend into a “Virtual/Cloud ECU”, reflecting the vehicle’s state in real-time.
- AI & Analytics Integration: This “Cloud ECU” data is directly accessible for services and workloads. Furthermore, Bigtable integrates natively with GCP’s advanced tools—allowing you to feed vehicle data directly into BigQuery for analytics, Looker for visualization, or Vertex AI for training and deploying automotive Gemini agents.
Maturity & Reference Model
Section titled “Maturity & Reference Model”Nexus is architected as a reference implementation. Much like AAOS, it is not intended to be a standalone “off-the-shelf” product, but rather the foundation for a specific OEM or provider distribution.
- Innovation at Speed: The current release is optimized to act as an accelerator for rapid prototyping and PoCs.
- Path to Production: While easy to deploy for PoCs, the system uses enterprise-grade components (like GCP CA Service and Bigtable) to ensure the architecture can be hardened for production maturity with minimal friction.
- Open Ecosystem: As an open-source project, Nexus serves as a baseline that can be extended with OEM-specific CAs or custom automotive services.